Į³╚š,Ż¼╬깯ÖC(j©®)ļŖ╣ż│╠┼cūįäė(d©░ng)╗»īW(xu©”)į║ŪÓ─ĻĮ╠Ĥ╣∙īÄ▀h(yu©Żn)▓®╩┐┼c└ź├„└Ē╣ż┤¾īW(xu©”)║Žū„Ż¼ęįĘ╔Į┤¾īW(xu©”)×ķĄ┌ę╗╩├¹å╬╬╗į┌ļŖäė(d©░ng)Ų¹▄ć(ch©ź)ŅI(l©½ng)ė“ć°(gu©«)ļHų¬├¹Ų┌┐»ĪČIEEE Transactions on Transportation ElectrificationĪĘ╔Ž░l(f©Ī)▒ĒŅ}×ķĪ░Handling-Stability Control for Distributed Drive Electric Vehicles via Lyapunov-Based Nonlinear MPC AlgorithmĪ▒Ą─╬─š┬,Ż¼╣∙īÄ▀h(yu©Żn)▓®╩┐×ķĄ┌ę╗ū„š▀,Ż¼└ź├„└Ē╣ż┤¾īW(xu©”)ĻÉŹśĮ╠╩┌×ķ╣▓═¼═©ėŹū„š▀ĪŻįōšō╬─╗∙ė┌└Ņč┼ŲšųZĘ“ĘŪŠĆąį─Żą═ŅA(y©┤)£y(c©©)┐žųŲ└Ēšō,Ż¼╠ß│÷┴╦ę╗ĘN├µŽ“Ęų▓╝╩ĮļŖ“ī(q©▒)äė(d©░ng)▄ć(ch©ź)▌vĄ─ų„äė(d©░ng)░▓╚½┐žųŲ▓▀┬į,Ż¼ėąą¦╠ß╔²▄ć(ch©ź)▌v▓┘ĘĆ(w©¦n)ąįŻ¼┤_▒Żąą±é░▓╚½,Ż¼ėą┴”ų¦ō╬┴╦ÖC(j©®)ąĄ╣ż│╠īW(xu©”)┐ŲĪ░Ž╚▀M(j©¼n)£y(c©©)┐ž╝╝ąg(sh©┤)┼c╣╩šŽį\öÓĪ▒ĘĮŽ“Ą─ą┬─▄į┤äė(d©░ng)┴”čbéõ╣▄┐ž╝╝ąg(sh©┤),ĪŻ
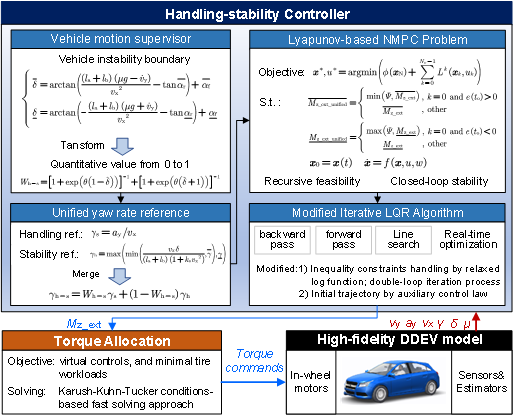
▓┘┐vĘĆ(w©¦n)Č©ąį╩Ū▄ć(ch©ź)▌vų„äė(d©░ng)░▓╚½┐žųŲųąĄ─ųžę¬ųĖś╦(bi©Īo)ų«ę╗Ż¼ų▒ĮėøQČ©ų°±{±éåTĄ─▓┘┐ž¾w“×(y©żn)║═▄ć(ch©ź)▌v┐╣ö_╗žÜwĘĆ(w©¦n)Č©ąą±éĄ──▄┴”,ĪŻ×ķ┤╦,Ż¼▒Š╬─╠ß│÷┴╦ę╗ĘN├µŽ“Ęų▓╝╩ĮļŖ“ī(q©▒)äė(d©░ng)▄ć(ch©ź)▌vĄ─ą┬ą═▓┘┐vĘĆ(w©¦n)Č©ąį┐žųŲ▓▀┬įŻ║Ż©1Ż®įO(sh©©)ėŗ(j©¼)┴╦ę╗ĘNāHĻP(gu©Īn)ė┌Ū░▌å▐D(zhu©Żn)ĮŪĘ┤üą┼ŽóĄ─▀\(y©┤n)äė(d©░ng)▒O(ji©Īn)ČĮŲ„Ż¼īŹ(sh©¬)Ģr(sh©¬)įu(p©¬ng)╣└▄ć(ch©ź)▌vąą±éĀŅæB(t©żi),Ż¼▓ó╔·│╔Ą─ÖMö[ĮŪ╦┘Č╚Įy(t©»ng)ę╗ģó┐╝,Ż¼ęįŲ┌ĮŌøQśOŽ▐╣żørŽ┬▄ć(ch©ź)▌v▓┘┐vąį┼cĘĆ(w©¦n)Č©ąį─┐ś╦(bi©Īo)ķgø_═╗Ą─å¢(w©©n)Ņ}Ż¼╠ß╔²ģf(xi©”)š{(di©żo)┐žųŲą¦╣¹,ĪŻŻ©2Ż®╠ß│÷┴╦ę╗ĘN╗∙ė┌└Ņč┼ŲšųZĘ“ĘŪŠĆąį─Żą═ŅA(y©┤)£y(c©©)┐žųŲŻ©LNMPCŻ®Ą─ų▒ĮėÖMö[┴”Šž┐žųŲŲ„Ż¼ėąą¦▒ŻūCķ]Łh(hu©ón)ĘĆ(w©¦n)Č©ąį,Ż╗×ķīŹ(sh©¬)¼F(xi©żn)īŹ(sh©¬)Ģr(sh©¬)ā×(y©Łu)╗»,Ż¼ķ_(k©Īi)░l(f©Ī)┴╦ę╗ĘNĖ─▀M(j©¼n)Ą─Ą³┤·ŠĆąįČ■┤╬ęÄ(gu©®)äØŲ„Ż©iLQRŻ®╦ŃĘ©,Ż¼└¹ė├╦╔│┌ī”(du©¼)öĄ(sh©┤)šŽĄK║»öĄ(sh©┤)║═ļpŁh(hu©ón)Ą³┤·ĘĮ╩Į┤_▒Ż▓╗Ą╚╩Į╝s╩°Śl╝■Ż¼▓óūC├„┴╦įō╦ŃĘ©Ą─Ū¾ĮŌūŅā×(y©Łu)ąį,Ż╗└¹ė├▌oų·┐žųŲ┬╩┤_Č©╦ŃĘ©│§╩╝ĮŌ,Ż¼ĮĄĄ═│§ųĄ├¶ĖąąįĪŻŻ©3Ż®└¹ė├╗∙ė┌KKTūŅā×(y©Łu)Śl╝■Ą─┴”ŠžĘų┼õĘĮĘ©,Ż¼ā×(y©Łu)╗»╠ōöM┐žųŲ┴”Šž▓ó½@Ą├Ė„▌å▌×ļŖÖC(j©®)┴”Šž├³┴Ņ,ĪŻŻ©4Ż®Ę┬šµ║═ė▓╝■į┌Łh(hu©ón)īŹ(sh©¬)“×(y©żn)▒Ē├„Ż¼╦∙╠ß│÷Ą─▓▀┬į─▄ėąą¦╠ß╔²▄ć(ch©ź)▌v▓┘┐vĘĆ(w©¦n)Č©ąį─▄,Ż¼Š▀ėą┴╝║├Ą─īŹ(sh©¬)Ģr(sh©¬)ėŗ(j©¼)╦Ńą¦┬╩,ĪŻ
ĪČIEEE Transactions on Transportation ElectrificationĪĘ×ķųą┐Ųį║ę╗ģ^(q©▒)TOPŲ┌┐»Ż¼ė░Ēæę“ūėŻ║7.2,Ż¼čąŠ┐ŅI(l©½ng)ė“░³└©ļŖäė(d©░ng)Ų¹▄ć(ch©ź)Ż©░³└©╣½┬Ę,ĪóįĮę░ĪóĘŪ╣½┬Ę║═▄ēĄ└▄ć(ch©ź)▌v,Īó’wÖC(j©®)║═┤¼▓░Ż®Ą─ļŖ┴”║═─▄┴┐▐D(zhu©Żn)ōQ,Īó═Ų▀M(j©¼n)║═“ī(q©▒)äė(d©░ng)ŽÓĻP(gu©Īn)Ą─ĮM╝■ĪóūėŽĄĮy(t©»ng),ĪóŽĄĮy(t©»ng),Īóś╦(bi©Īo)£╩(zh©│n)║═ļŖŠW(w©Żng)Įė┐┌╝╝ąg(sh©┤)Ą╚ĪŻ
šō╬─µ£ĮėŻ║
https://ieeexplore.ieee.org/document/10786301
ĖÕ╝■üĒ(l©ói)į┤Ż║ÖC(j©®)ļŖ╣ż│╠┼cūįäė(d©░ng)╗»īW(xu©”)į║
═©ėŹåTŻ║╝o(j©¼)ĮŁ